
Настройка системы автоматического регулирования (САР) высокого порядка на оптимальные показатели качества может быть решена только с использованием современных систем математического моделирования. В качестве такой системы использовалась универсальная система блочного имитационного визуально-ориентированного математического моделирования VisSim 4.5, созданная корпорацией Visual Solution Inc. (США).
Подобной передаточной функцией описываются многие технические системы, в частности, к такому виду можно привести САР напряжения синхронного генератора.
В среде VisSim была реализована математическая модель САР, состоящая из четырёх последовательно соединенных инерционных звеньев 1-го порядка. При подаче на вход системы единичного ступенчатого воздействия получается переходная характеристика, по которой можно определить прямые показатели качества (рисунок 1).
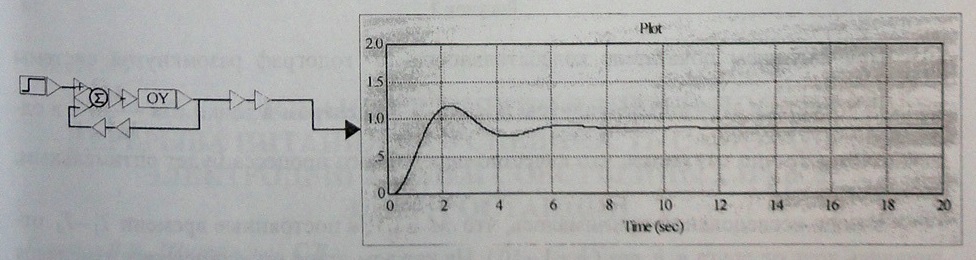
В процессе исследований системы ставилась задача найти такие соотношения между постоянными времени , чтобы, с одной стороны, обеспечить высокую точность поддержания регулируемого параметра (статика), и, с другой стороны, обеспечить основные качественные показатели в переходном режиме (плавность переходной характеристики, высокое быстродействие и т. д.), т. е. приемлемые динамические характеристики.
Известно, что статическая точность а системы определяется коэффициенту усиления К.
Т. е. чем больше К, тем точнее поддерживается выходная величина. Увеличение коэффициента усиления ограничивается двумя факторами: устойчивостью и чрезмерной колебательностью переходной характеристики.
Для контроля устойчивости вычисляется предельный коэффициент усиления КПР по критерию Гурвица для системы 4-го порядка.
В качества критерия качества использовался показатель колебательности:
Он равен максимальному значению АЧХ замкнутой САР, приведенной к коэффициенту усиления в области низких частот.
Визуализация этого критерия представлена на рисунке 2.
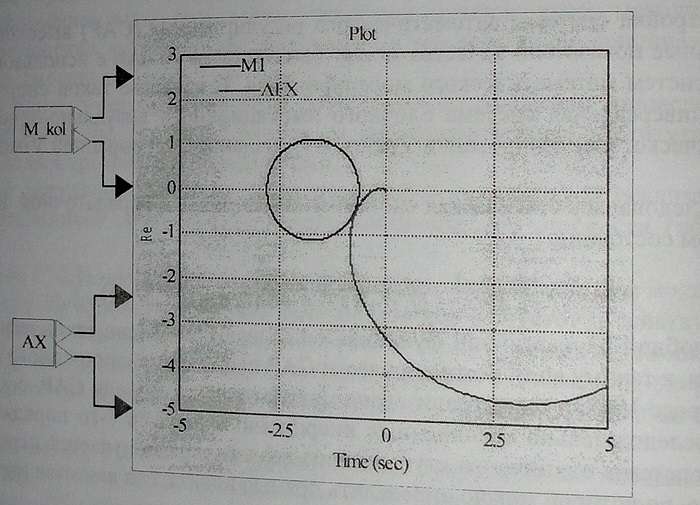
При заданном показателе колебательности М годограф разомкнутой системы должен коснуться окружности радиуса с центром в точке в одной точке. Обычно считается, что качество переходного процесса будет оптимальным если М=1,1-1,5.
В ходе исследований принималось, что М=1,3, а постоянные времени Т1-Т4 отличались друг от друга в h раз (h=1 — 10). На каждом этапе моделирования изменялся параметр h и находился такой коэффициент усиления К, при котором годограф и окружность с М=1,3 касались друг друга в одной точке.
Проверялось известное практическое правило, что предельное значение передаточного коэффициента САР зависит от соотношения постоянных времени и не зависит от их абсолютных значений, и поэтому при конструировании систем необходимо стремится как можно больше «раздвинуть» постоянные времени.
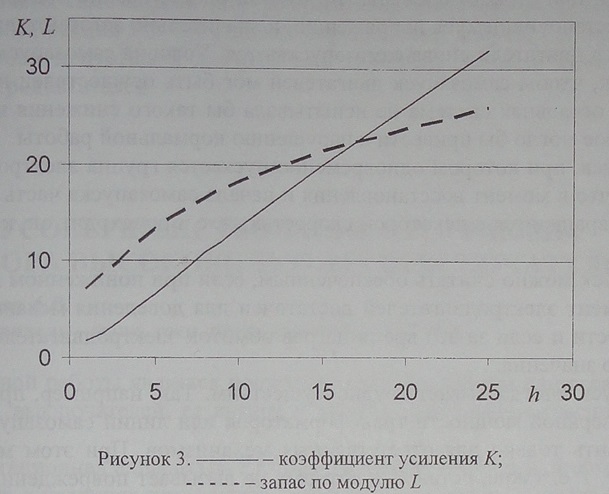
Как видно из представленных на рисунке 3 зависимостей, полученных по результатам моделирования, с ростом h увеличивается коэффициент усиления К, при котором обеспечивается оптимальный переходный процесс, а также растет запас по модулю.
Однако, статическая точность системы достигает значения 5 %, общепринятого в технических устройствах, только в случае «разнесения» постоянных времени примерно на полторы декады.
Таким образом, для получения оптимальных показателей качества как в статическом, так и в динамическом режимах необходимо, чтобы постоянные времени Т1-Т4 отличались друг от друга как минимум в 15-20 раз.
- 28.Мар.2015 - Автоматизация ТЭЦ. АСУ ХВО, деаэратора, РОУ, ПСВ
- 28.Мар.2015 - Автоматическая система регулирования на ТЭЦ. Вспомогательное оборудование
- 26.Мар.2015 - Дистанционные защиты, их сущность, характеристики и общий принцип выполнения.
- 26.Мар.2015 - Принципы выполнения реле направления мощности
- 26.Мар.2015 - Общий принцип выполнения устройств релейной защиты, структура устройства